|
Jinxuan Zhu | 朱锦轩 I am currently a Master’s student in Artificial Intelligence (MComp AI) at the National University of Singapore (NUS), where I am conducting my dissertation project under the supervision of Prof. David Hsu. Prior to this, I received my Bachelor’s degree in Automation from the Harbin Institute of Technology, Shenzhen (HITSZ). I am fortune to be a research intern at NUS LinS Lab advised by Prof. Lin Shao . Previously, I worked as a research assistant with Prof. Xueqian Wang at Tsinghua SIGS and Prof. Yanjie Li at HITSZ. My research interest focus on Robotics and Embodied AI. Email: jinxuanzhu[at]u.nus.edu Email / CV / GitHub / Google Scholar / WeChat Looking for Ph.D. Opportunity in 2027 Spring/Fall Intake.
×
|

|
News
|
Publications |
|
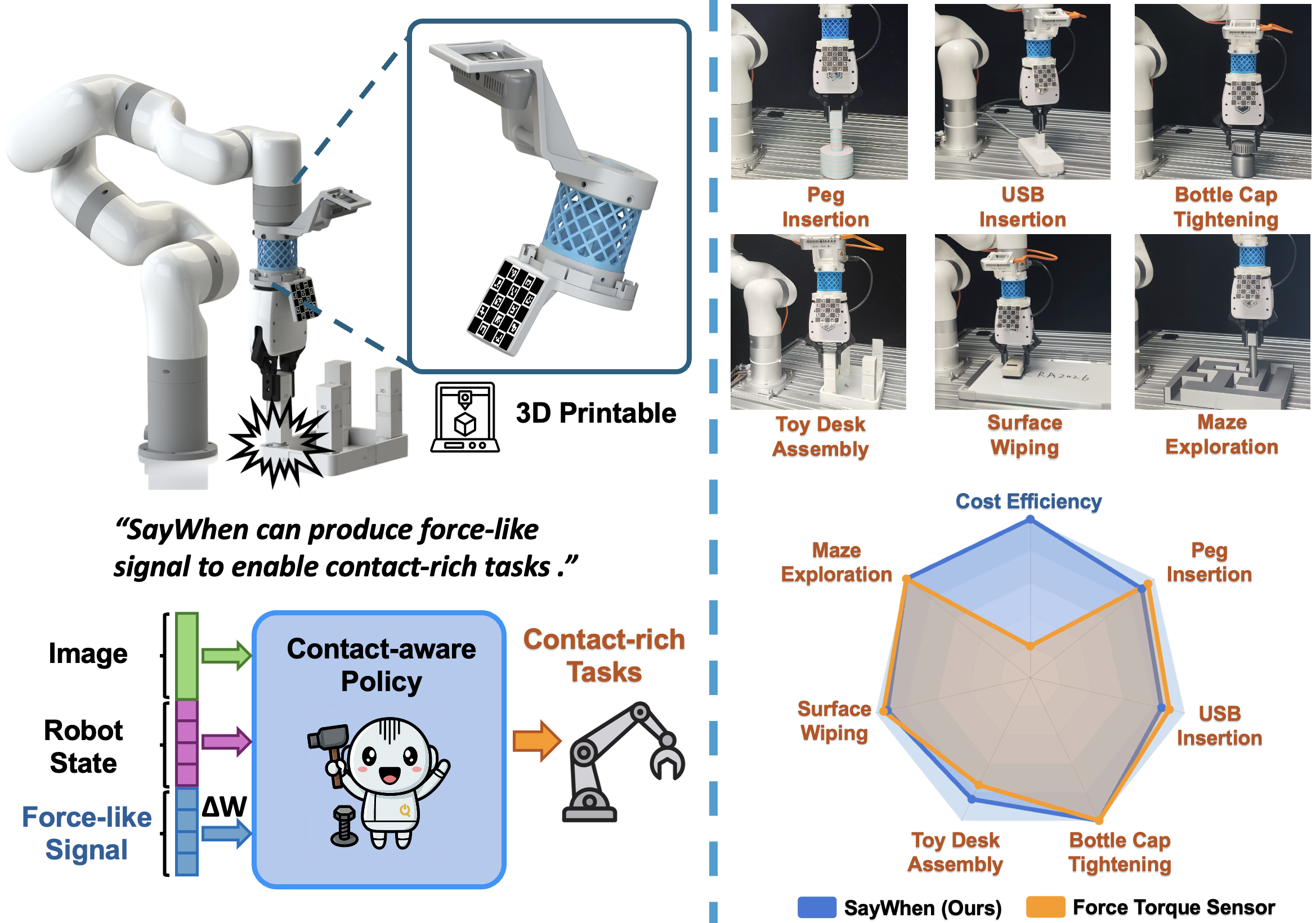
ShapeForce: Low-Cost Soft Robotic Wrist for Contact-Rich Manipulation
, , , , , , , IEEE International Conference on Robotics and Automation (ICRA2026) Website / arXiv / Code(Coming Soon)
TL;DR:
A plug-and-play soft robotic wrist that converts external forces into measurable deformations, providing low-cost and robust force-like signals for contact-rich manipulation.
|
|
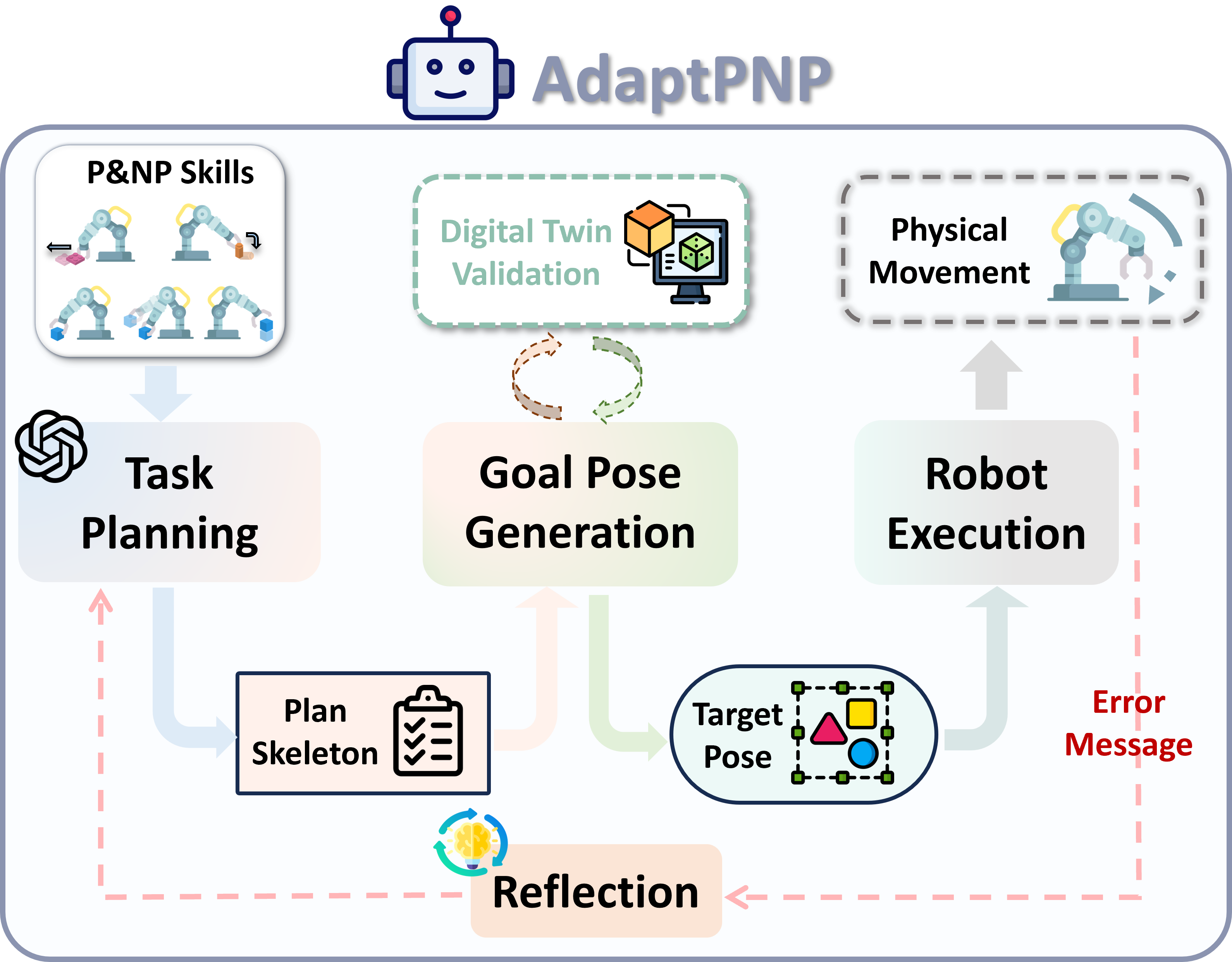
AdaptPNP: Integrating Prehensile and Non-Prehensile Skills for Adaptive Robotic Manipulation
, , , , , , , , , , IEEE International Conference on Robotics and Automation (ICRA2026) Website / arXiv / Code(Coming Soon)
TL;DR:
A VLM-guided framework that adaptively combines prehensile and non-prehensile skills, leveraging a digital twin to generate 6D pose representations for robust manipulation.
|
|
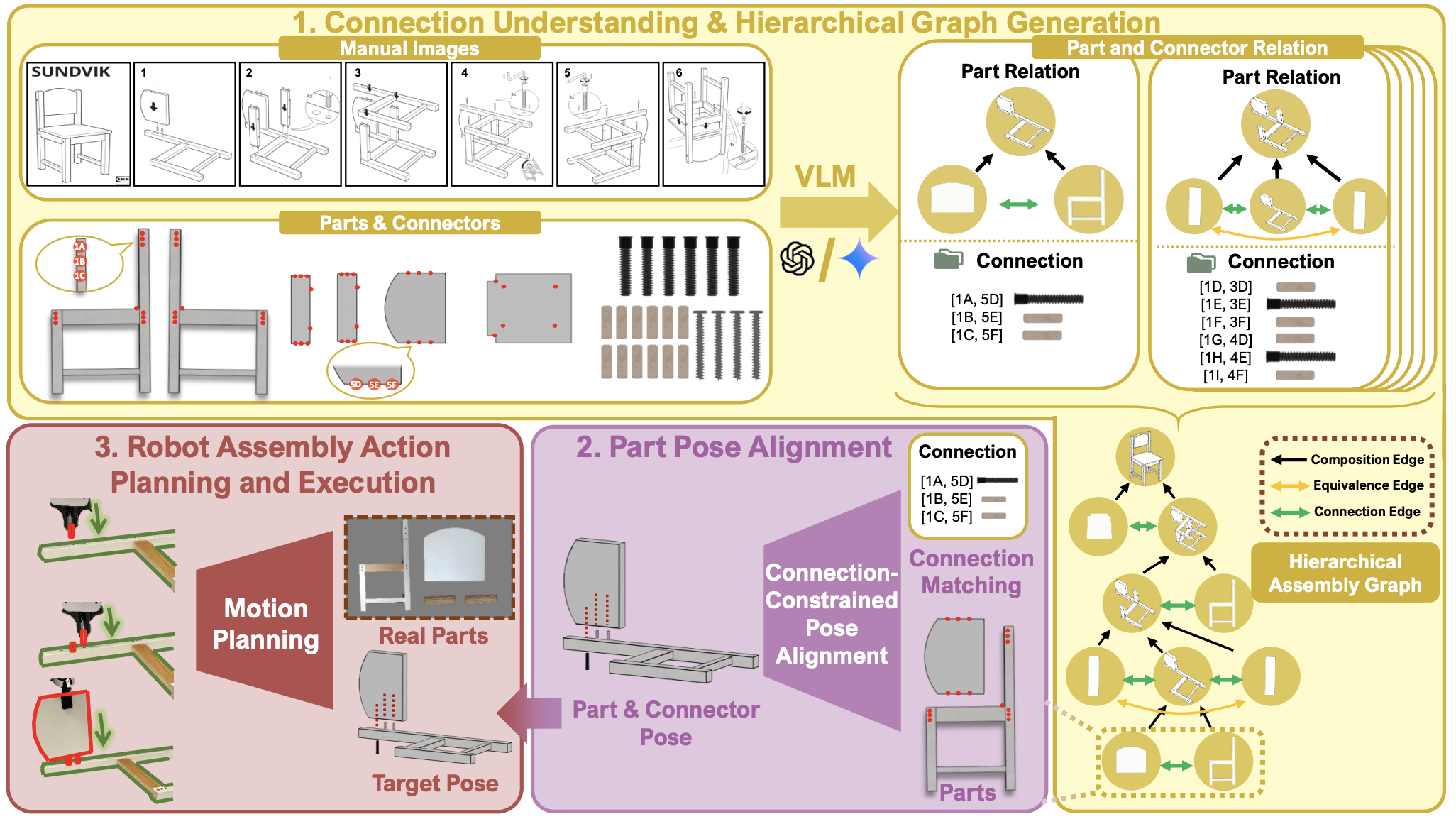
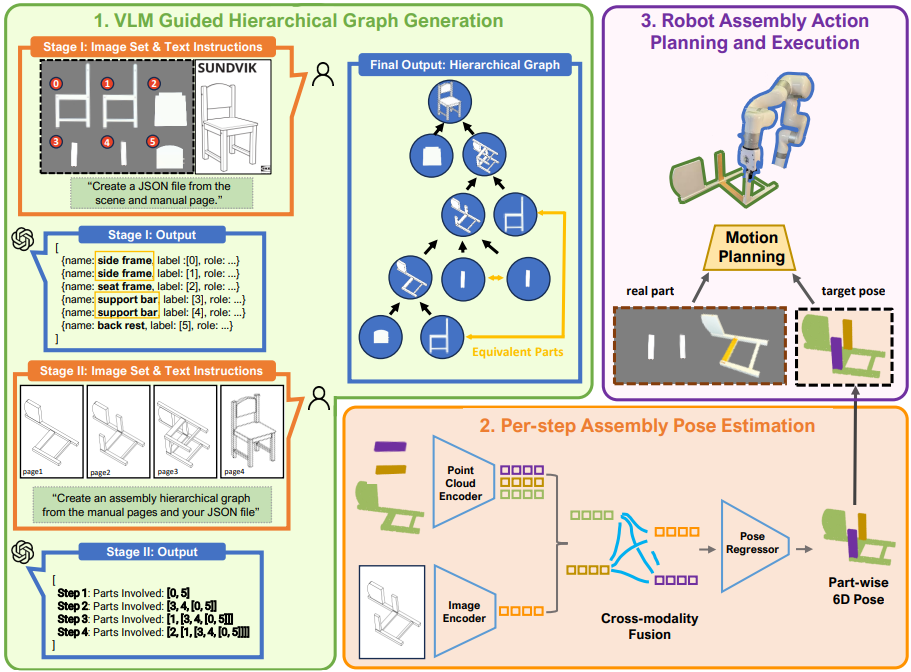
Manual2Skill++: Connector-Aware General Robotic Assembly from Instruction Manuals via Vision–Language Models
, , , , , , , , , , , IEEE International Conference on Robotics and Automation (ICRA2026) Website / arXiv
TL;DR:
Manual2Skill++ presents a framework that leverages vision-language models to automatically extract structured assembly knowledge from manuals and translate it into reusable robot manipulation skills.
|
|
Manual2Skill: Learning to Read Manuals and Acquire Robotic Skills for Furniture Assembly Using Vision-Language Models
, , , , , , , , , Robotics: Science and Systems (RSS 2025) CVPR 2025 Workshop Robo-3DVLM Website / arXiv / Media (机器之心)
TL;DR:
Teach robots to assemble furniture by reading manuals and transforming the instructions into executable skills.
|
|
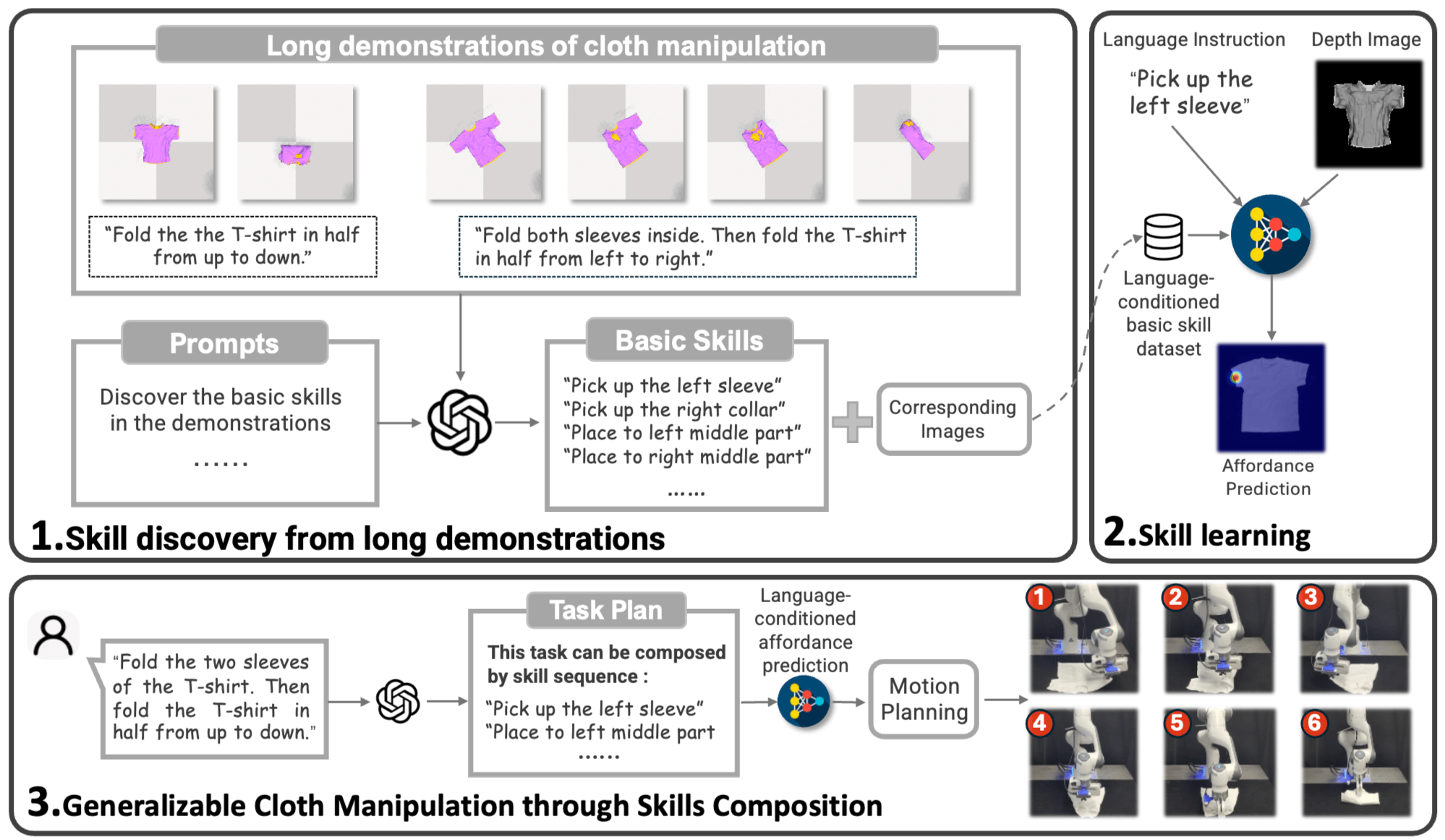
Learning Generalizable Language-Conditioned Cloth Manipulation from Long Demonstrations
, , , , , IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025) Website / arXiv
TL;DR:
Propose a novel pipeline utilizing LLM to discover basic skills from existing benchmarks and compose them
to generalize to novel long-horizon cloth manipulation tasks.
|
|
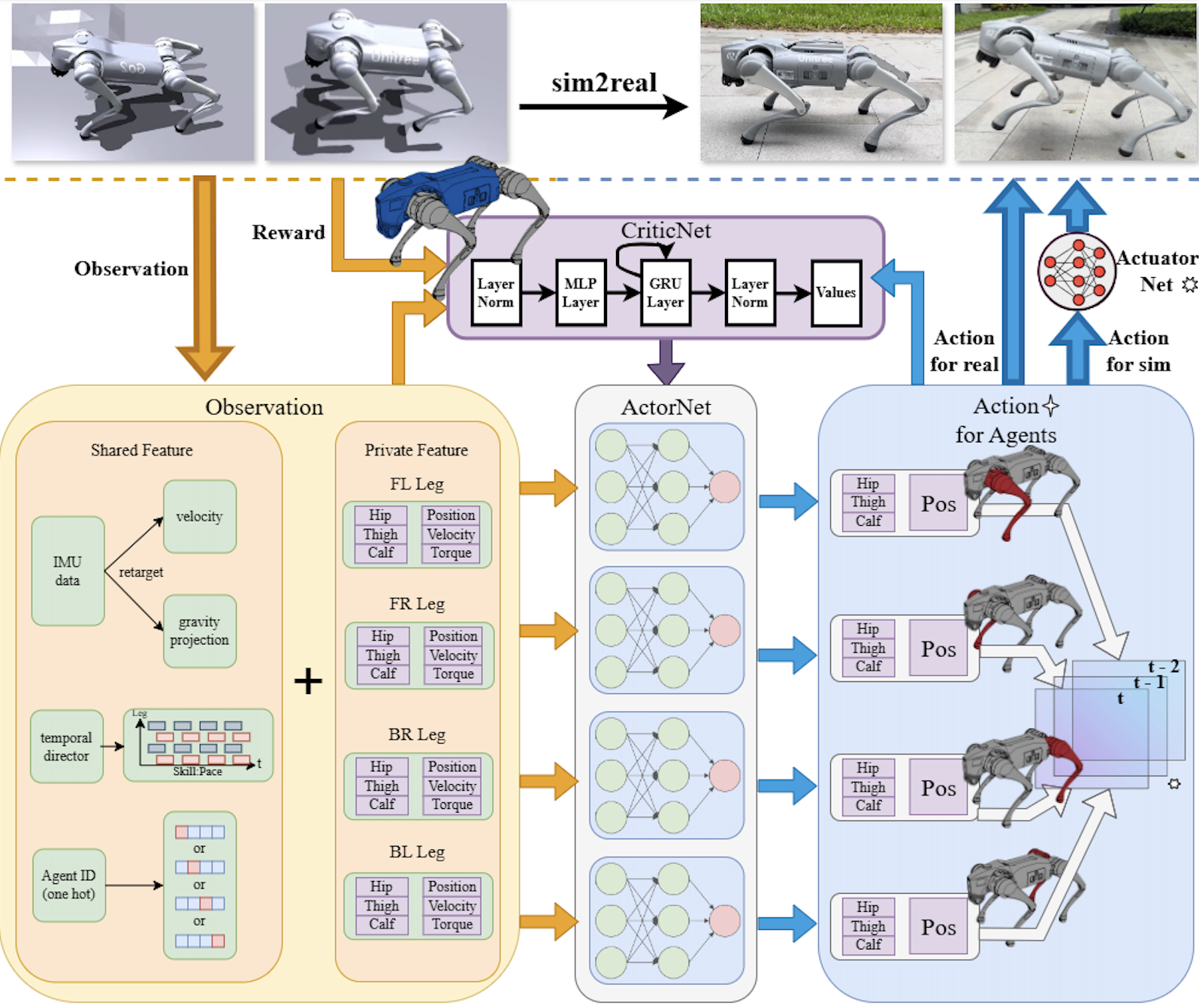
MASQ: Multi-Agent Reinforcement Learning for Single Quadruped Robot Locomotion
*, *, , , , ICML 2025 Workshop NewInML arXiv / Video / Press
TL;DR:
Introduce MASQ, a novel approach using multi-agent reinforcement learning (MARL) for single quadruped robot locomotion. By treating each leg as an independent agent, MASQ accelerates learning and boosts real-world robustness, surpassing traditional methods.
|
Education |
|
National University of Singapore, Singapore 2025.8 - 2027.1(expect)Master of Computing in Artificial Intelligence |
|
Harbin Institute of Technology, Shenzhen, China 2021.09 - 2025.07Bachelor of Engineering in AutomationGPA: 3.7/4.0 Rank: 10% |
Experience |

|
NUS Learning and Intelligent Systems Lab (LinS Lab), Singapore 2024.12 - presentResearch InternAdvisor: Prof. Lin Shao |

|
City University of HongKong, Hong Kong, China 2025.02 - 2025.05Exchange Student |
|
AI&Robot Lab at Tsinghua SIGS, Shenzhen, China 2024.07 - 2025.03Research InternAdvisor: Prof. Xueqian Wang |

|
Reinforcement Learning Group (RLG) at HTISZ, Shenzhen, China 2023.11 - 2024.10Research InternAdvisor: Prof. Yanjie Li |

|
University of Oxford, Oxford, UK 2023.08Summer Programme in Machine Learning and Artificial Intelligence (fully funded) |
Employment |
|
|
Sharpa Robotics Co., Ltd. 2025.12 - presentRobotics Manipulation Algorithm Intern |

|
Roboscience Co., Ltd. 2025.3 - 2025.8Robotics Manipulation Algorithm Intern |
|
Dobot Robotics Co., Ltd. 2024.7 - 2024.11Robotics Imitation Learning Algorithm Intern |
Project Demo: Single-Take Robot Assembling IKEA FurnitureWatch how our robot autonomously assembles IKEA furniture 🪑🤖 — a project I contributed to during my internship at Roboscience. |
Project Demo: Fully autonomous pinwheel assembly—live at CES 2026Watch how our robot autonomously assembles pinwheel — a project I engaged during my internship at Sharpa. |
Award
|
MiscI enjoy playing basketball 🏀 and hiking 🏃. I'm also the guitarist in a band formed with friends since high school, where I play electric guitar 🎸. |
|
Thanks for your visiting😊! Feel free to contact me if you have any problems.
|